
014vc++ 行人检测与跟踪系统设计(400元)
- 模板售价:¥300.00元
- 成品编号:009vc014
- 使用技术:无
- 数据库:无
- 最后更新:2018-11-15 21:33
注意:QQ2748904540,qq3300576459为本网站唯一售卖成品的账号,其他均为盗版
014vc++ 行人检测与跟踪系统设计(400元)的大图展示
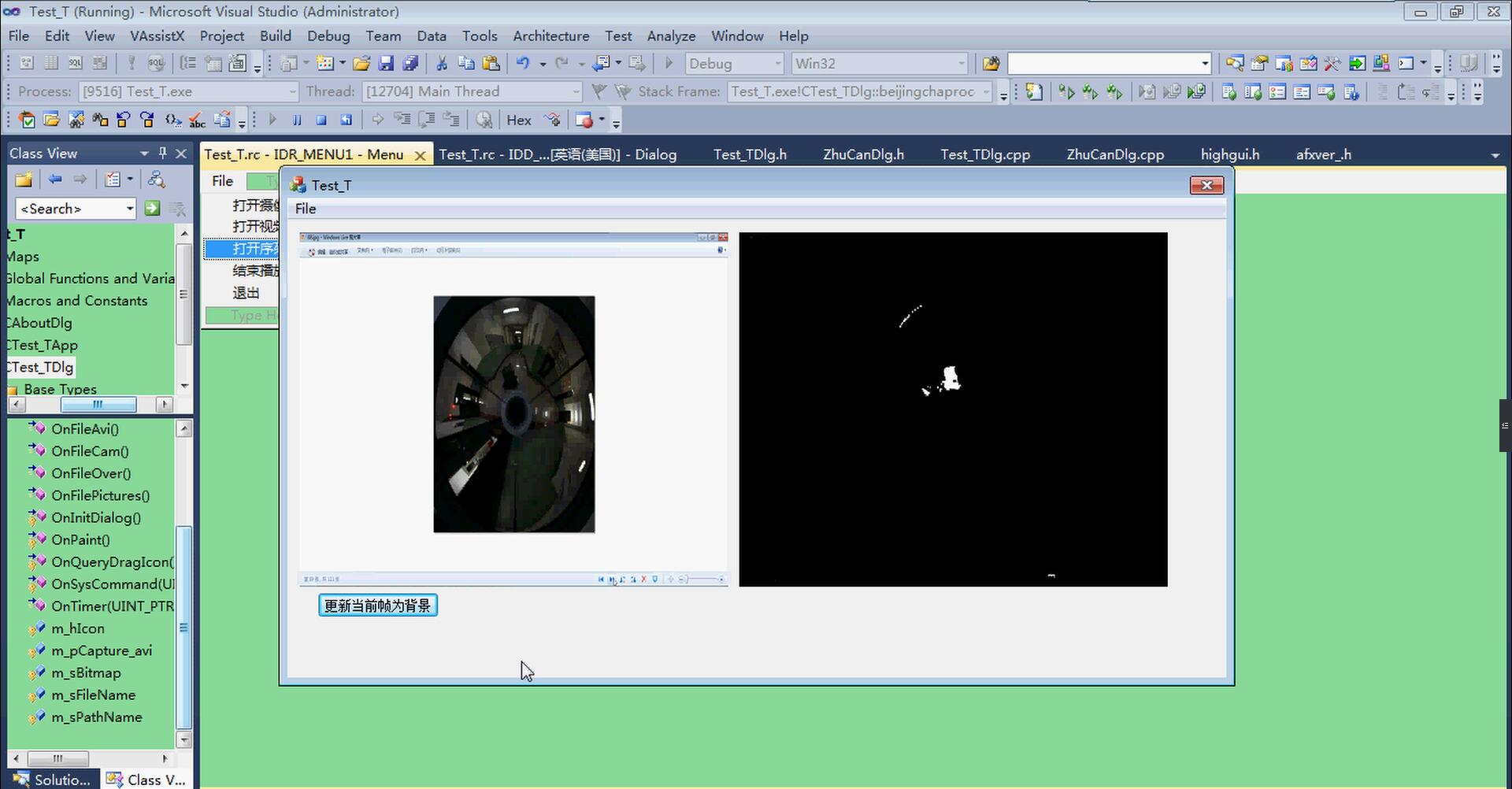
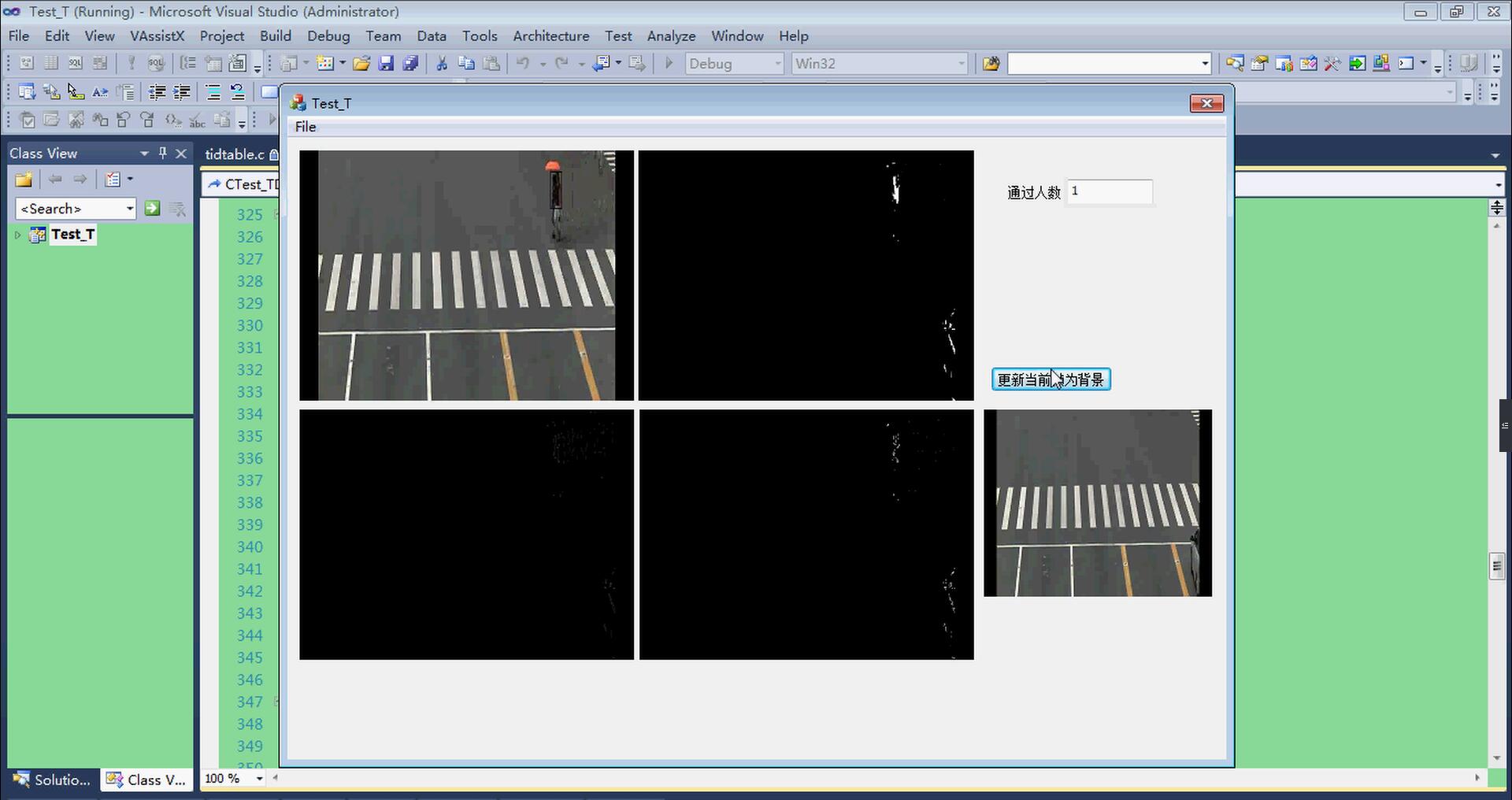
 全屏查看大图演示
全屏查看大图演示
计算机毕业设计源码网:我们提供的源码通过邮箱或者QQ传送,如果有啥问题直接联系客服
素材描述:
本设计内容包含:源代码,演示视频,3.3w字论文
本套设计的功能如下:
本套设计的功能如下:
目 录
第1章绪论 1
1.1 课题的研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 折反射全景视觉系统的国内外研究现状 1
1.2.2 运动目标检测的研究现状 2
1.2.3 目标识别的国内外研究现状 4
1.3 本文的主要工作 6
1.3.1 论文主要研究内容 6
1.3.2 论文章节安排 6
第2章全景成像系统及图像预处理 9
2.1 反射全景视觉系统 9
2.1.1反射全景视觉系统组成 9
2.1.2反射全景图像成像原理 10
2.2 色彩空间与转换 10
2.2.1 RGB颜色模型 11
2.2.2 YUV颜色模型 11
2.3 图像预处理 12
2.4 本章小结 16
第3章基于全景视觉的运动目标检测算法研究 17
3.1 光流法研究 17
3.2 帧间差分法的研究与实现 17
3.2.1 帧间差分法及其改进算法 17
3.2.2 实验结果与分析 22
3.3 背景差分法的研究与实现 24
3.3.1 背景差分法基本原理 24
3.3.2 典型的背景建模方法 25
3.3.3 实验结果与分析 30
3.4 帧间差分法结合背景差分的运动目标检测算法 31
3.4.1 算法原理 31
3.4.2 实验结果与分析 33
3.5 后处理 34
3.5.1 形态学处理 34
3.5.2 连通性分析 35
3.5.3 实验结果与分析 36
3.6 本章小结 37
第4章基于全景视觉的移动机器人目标识别方法研究 38
4.1 图像特征描述 38
4.1.1 颜色特征 38
4.1.2 形状特征 39
4.1.3 Hu不变矩 39
4.1.4 尺度不变特征SIFT 41
4.2 运动目标识别方法研究 45
4.2.1 基于颜色的目标识别方法 46
4.2.2 基于形状的目标识别 46
4.2.3 基于不变矩的目标识别 48
4.2.4 基于SIFT特征匹配的目标识别算法 51
4.3 本章小结 59
第5章运动目标检测和识别系统设计与实现 60
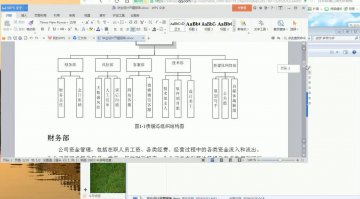
5.1 系统总体设计 60
5.2 模块功能实现 60
5.3 实验结果及分析 62
5.3.1 运动目标检测的实验结果及分析 62
5.3.2 运动目标识别的实验结果及分析 66
5.4 本章小结 74
结论 75
参考文献 77
攻读硕士学位期间发表的论文和取得的科研成果 82
致谢 83
相关推荐

标签

全部评论 / 0