
Y011+基于单片机动态颜色目标跟踪系统c(300元)
- 模板:¥300.00
- 成品编号:wwy011
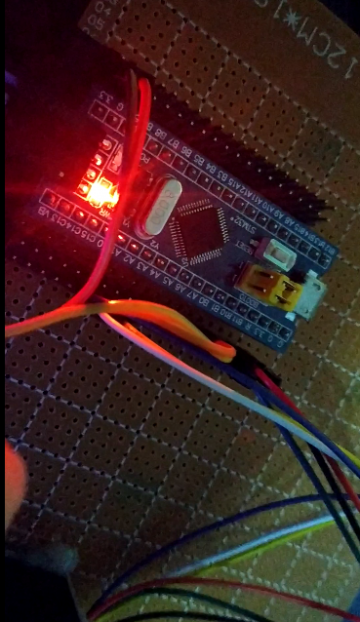
- 使用技术:STM32
- 数据库:无
- 最后更新:2018-11-21 13:55
注意:QQ1764030875,qq1834660615为本网站唯一成品的账号,其他均为盗版
Y011+基于单片机动态颜色目标跟踪系统c(300元)的大图展示

 全屏查看大图演示
全屏查看大图演示
计算机毕业设计源码网:我们提供的源码通过邮箱或者QQ传送,如果有啥问题直接联系客服
素材描述:本套单片机设计包含程序,原理图,演示视频
本套设计要实现的功能如下:
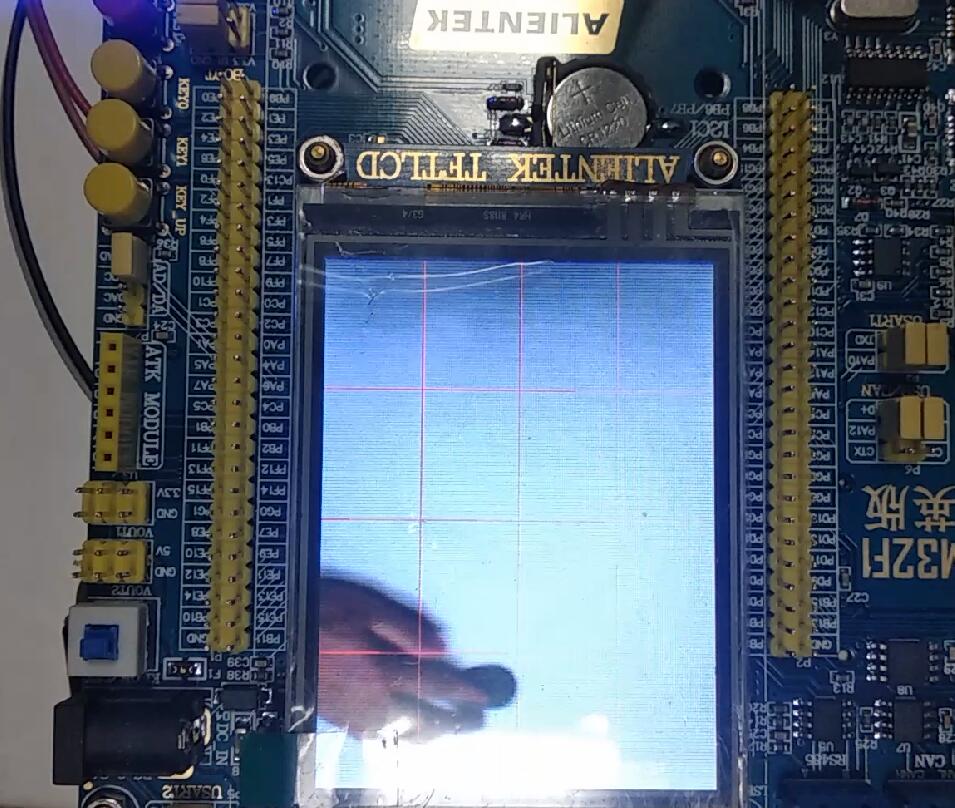
以stm32f10x开发板作为控制核心。显示模块为2.8寸tftLCD。摄像头采样模块通过带FIFO的ov7725摄像头采样出运动小球的信息,传送到stm32单片机上。在stm32单片机上编写合理的程序对采样信息进行分析,得出颜色和位置信息并并每隔一段帧数转换显示到显示模块上。显示为:相应颜色汉字和位置区域标号,大概只要设置一个简单的RGB颜色阀值对比和判断二维的小球球心像素点坐标区域1.2.34....并取帧显示到图像上。
具体实现功能:对动态颜色小球进行跟踪,即对颜色小球进行颜色识别和位置跟踪;
跟踪环境:简单背景,即视觉范围内只有白色背景和颜色小球,每次识别单个小球。
颜色识别:用rgb阈值做识别,如果rgb效果不好,用hsl模型,识别颜色三,四个即可。
位置识别:先基于一帧图片求得小球在图像上的大概圆心所在的像素点坐标,再将图像分为16个区域,判断圆心像素点在那个区域,区域号设为1.2.3.。。16即可。
跟踪实现:在摄像时,每隔一定合适的帧数做一次上述两个识别得到颜色和坐标,将其显示到录像的显示屏上。显示为左上角为:对应颜色字符+区域号字符;显示时间直到小球到达下个区域在变,摄像后如此循环达到跟踪目的。
位置识别的方法是将采样图片中颜色小球的近似中心的颜色像素坐标作为小球的位置。
具体方法:配置好视觉环境,使ov7670摄像头的视觉范围仅能有白色平台和颜色运动小球,在识别运动颜色小球的颜色时,手动小球使其运动到摄像头的视觉范围内,通过配置好的OV7670摄像头配合采样,输出合适的格式,在程序中设置R,G,B阀值对每个像素的R,G,B进行比较,对整个图片格式进行扫描,得到最上面的小球颜色像素坐标,将其x坐标作为球心的x坐标,得到最左端的小球颜色像素坐标,将其y坐标作为球心的y坐标,这样就得到了球心的(x,y)平面坐标。再将图像依据2.8寸屏分为16个区域,判断圆心像素点在那个区域,区域号设为1.2.3.。。16即可。
相关推荐

标签

全部评论 / 0