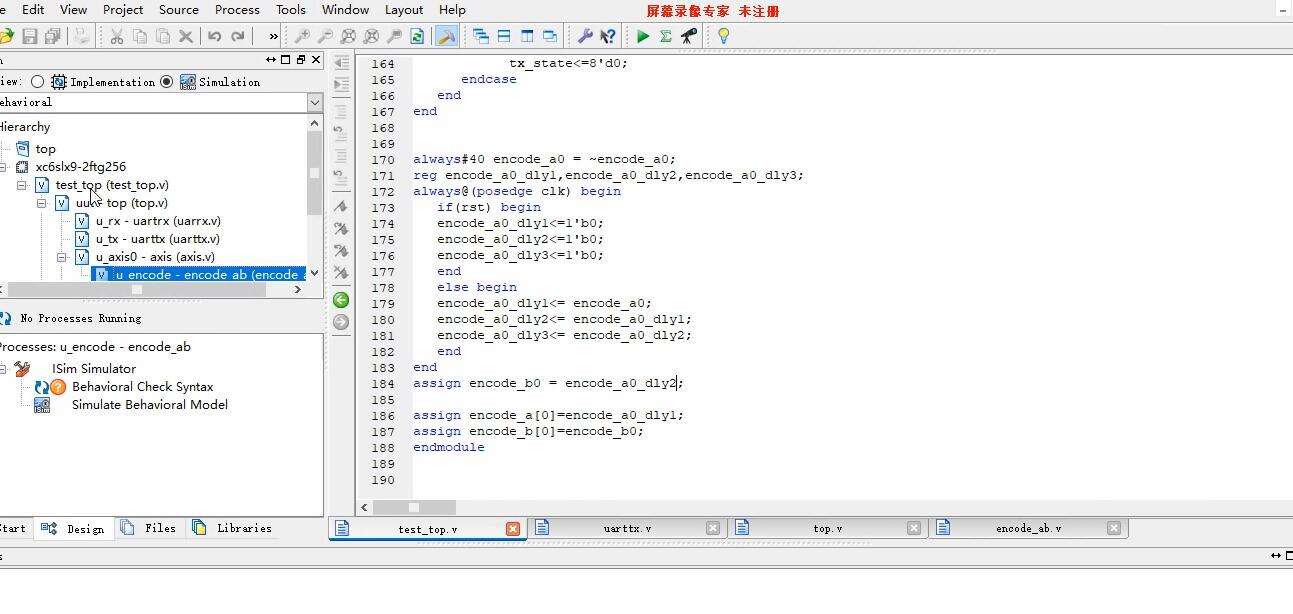
Y064+基于FPGA控制多自由度机械臂系统c(300元) 模板:¥300.00 成品编号:wwy064 使用技术:FPGA 数据库:无 最后更新:2018-11-21 10:02 视频演示备用演示微云演示 注意:QQ1764030875,qq1834660615为本网站唯一成品的账号,其他均为盗版 在线 Y064+基于FPGA控制多自由度机械臂系统c(300元)的大图展示 全屏查看大图演示 作品详情 下载记录() 立即下载 计算机毕业设计源码网:我们提供的源码通过邮箱或者QQ传送,如果有啥问题直接联系客服 素材描述:本套fpga设计包含程序,原理图,演示视频 本套设计要实现的功能如下: 串口模块:实现与上位机通过串口通讯,接收上位机设置的运动距离,加速度和最大速度信息,用于控制电机。信息包括3个轴,分别代表X,Y,Z坐标系的3个电机,理论上实现6个自由度的机械臂控制。同时需要将编码器模块(3个轴)的计数器反馈回给上位机。 电机控制模块:使用上位机设置的参数,生成控制电机的PWM信号。 编码器反馈模块:将3个轴的编码器信号解析,生成计数器,将计数结果实时发送给串口模块,串口反馈回给上位机。 登录之后才能评论,请点击 登录。 全部评论 / 0 相关推荐 标签

 全屏查看大图演示
全屏查看大图演示

 全屏查看大图演示
全屏查看大图演示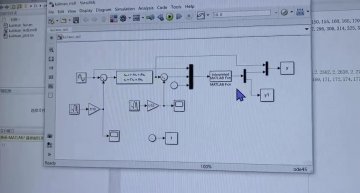

全部评论 / 0