2226+单片机人形智能机器人姿态控制C(300元)
- 模板:¥300.00
- 成品编号:wlq2226
- 使用技术:单片机
- 数据库:无
- 最后更新:2018-11-20 17:17
注意:QQ1764030875,qq1834660615为本网站唯一成品的账号,其他均为盗版
2226+单片机人形智能机器人姿态控制C(300元)的大图展示
 全屏查看大图演示
全屏查看大图演示
计算机毕业设计源码网:我们提供的源码通过邮箱或者QQ传送,如果有啥问题直接联系客服
素材描述:
本套单片机设计包含演示视频,论文1W字
本套设计要实现的功能如下:
第1章 绪 论 6
1.1 引言 6
1.2 舞蹈机器人研究背景 6
1.3 舞蹈机器人国内外研究现状 7
1.3.1 国外研究现状 7
1.3.2 国内研究现状 9
1.4 论文主要研究内容 10
第2章 舞蹈机器人设计总体方案 12
2.1 机器人本体结构分析 12
2.2 机器人功能和技术要求 12
2.21 功能要求 12
2.22 技术要求 12
2.3 舞蹈机器人总体控制方案 13
第3章 舞蹈机器人设计硬件系统 14
3.1 系统硬件结构构成 14
3.2 CPU及其外围接口电路模块 14
3.2.1 CPU选型 14
3.2.2 ATmega16性能与结构简介 15
3.2.3 单片机外围接口电路 16
3.3 电源模块 17
3.4 舵机的工作原理 18
3.4.1 舵机的工作原理 18
3.4.2 舵机的控制方法 19
第4章 舞蹈机器人软件设计 20
4.1 软件设计基本思想 20
4.2 单片机端软件设计 20
第5章 动作与音乐协调问题和抗干扰研究 22
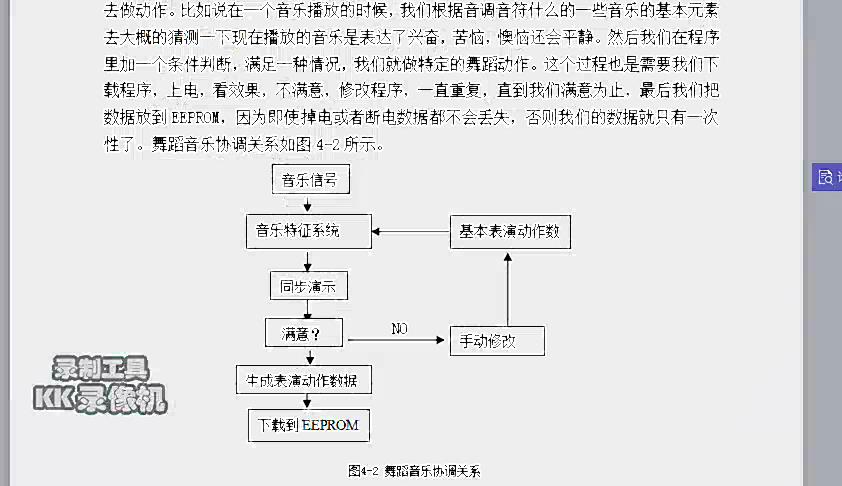
5.1 音乐协调问题基本设计思想 22
5.2 控制系统抗干扰措施 22
5.2.1 硬件抗干扰 23
5.2.2 软件抗干扰 23
结 论 24
参考文献 25
致 谢 27
附 录 主程序清单 28
相关推荐

标签

全部评论 / 0