002+t033+多工位转运五轴机械臂嵌入式控制系统设
- 模板:¥500.00
- 成品编号:ARM 002
- 使用技术:ARM
- 数据库:无
- 最后更新:2019-10-23 10:10
注意:QQ1764030875,qq1834660615为本网站唯一成品的账号,其他均为盗版
002+t033+多工位转运五轴机械臂嵌入式控制系统设的大图展示
 全屏查看大图演示
全屏查看大图演示
计算机毕业设计源码网:我们提供的源码通过邮箱或者QQ传送,如果有啥问题直接联系客服
素材描述:定制参考价格:2900元
成品价格:500元
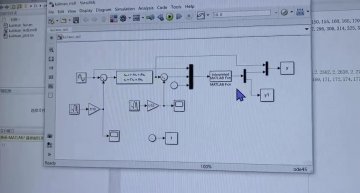
本套设计包含一套程序+仿真+硬件清单+任务书
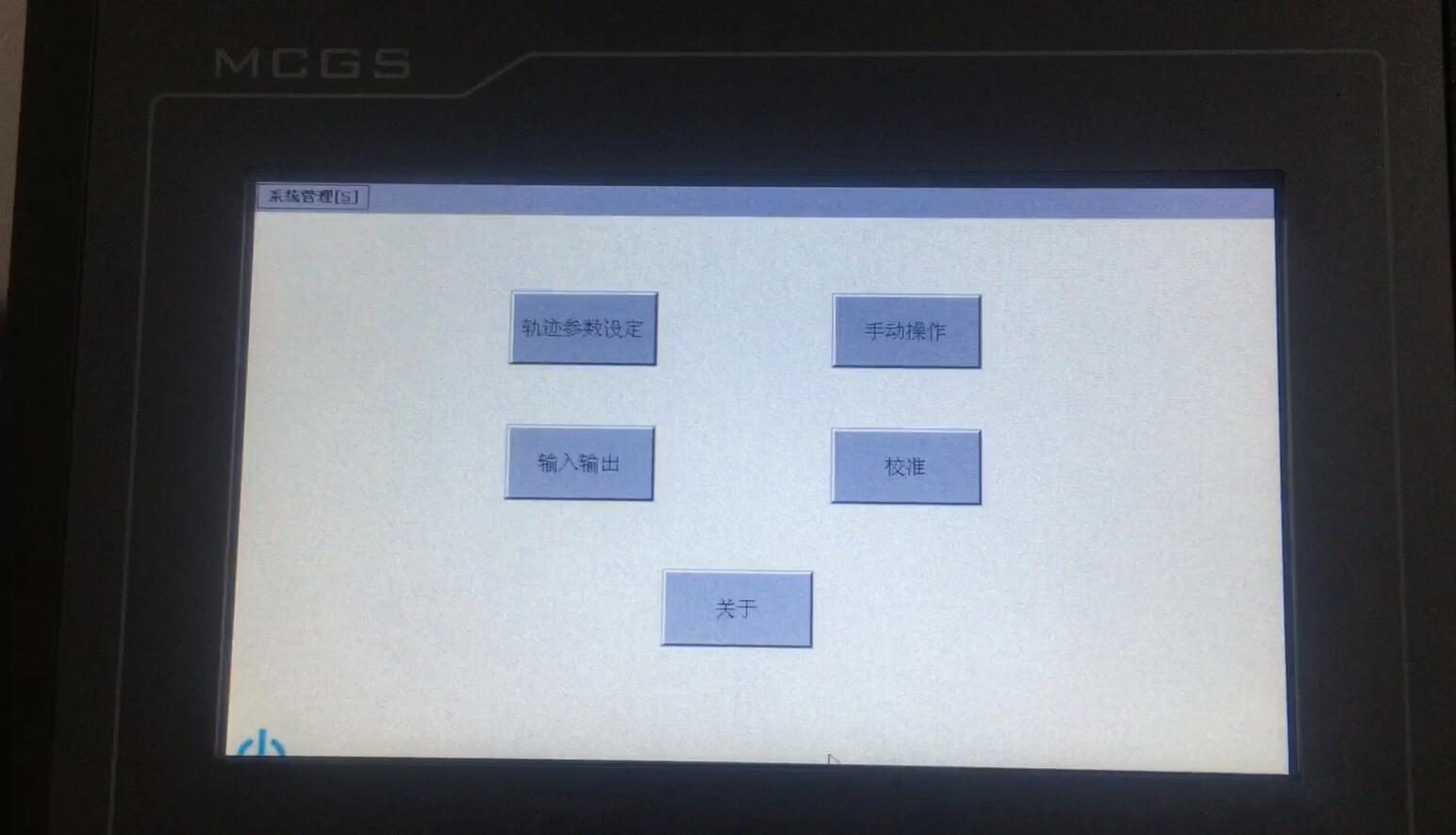
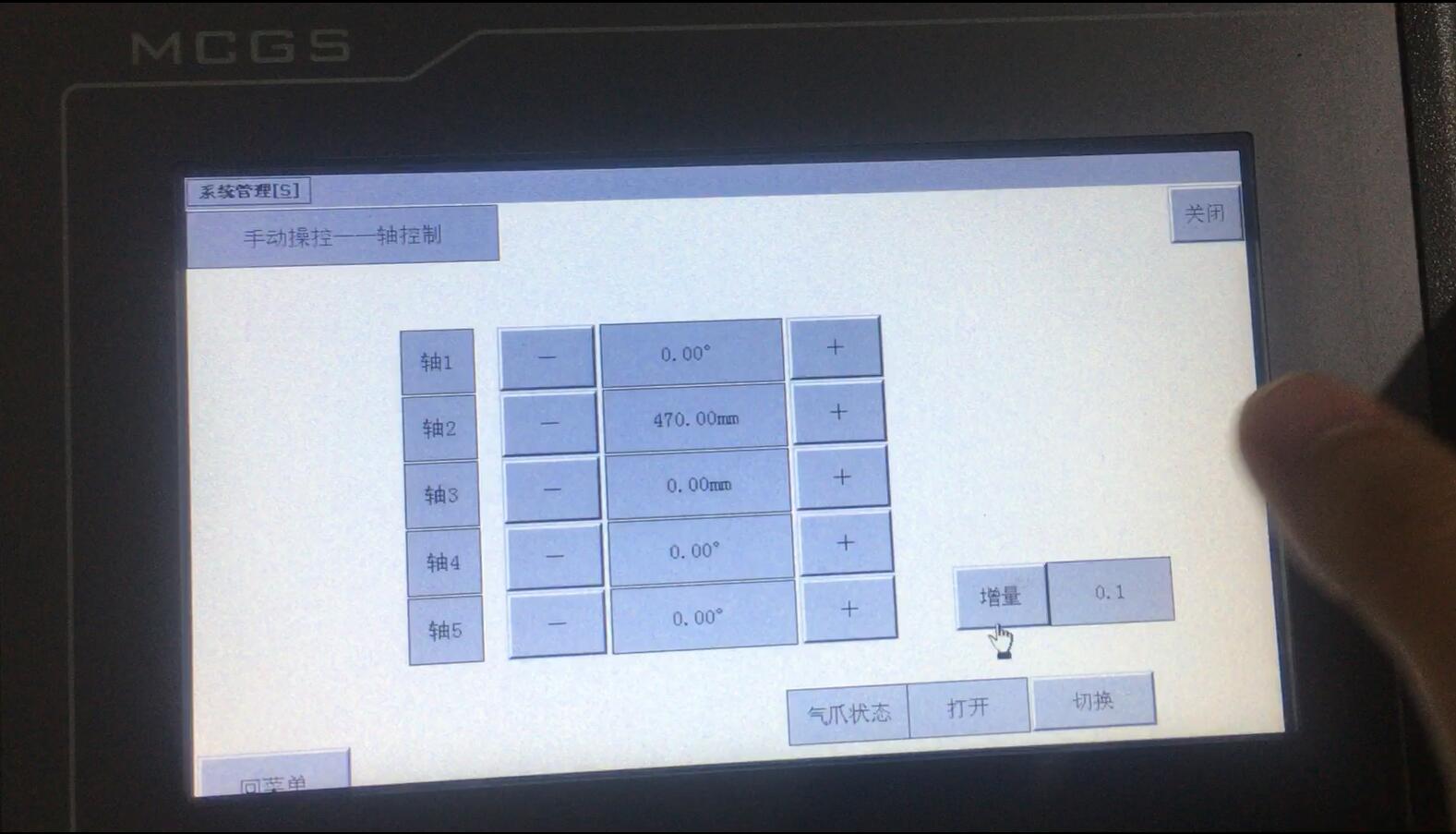
以ARM Corte_M4为核心,以昆仑通的触摸屏为人机界面,设计一套五轴机械臂控制系统,具有工件的夹取,XYZ三轴方向的移动、翻转的基本动作及按用户设计特定轨迹移动的功能。就是用户可以设定机械臂的移动轨迹,并使机械臂能自动运行。
驱动电机采用伺服电机,控制方式为脉冲+方向。实现设备的参数设定、手动操作及自动操作等功能。系统硬件软件设计需充分考虑可靠性和稳定性。
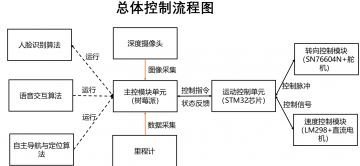
1、用输出LED信号:红黄绿表示机械臂的急停、待机、运行工作状态。
2、手动/自动模式的切换,自动模式下,机械臂进入用户设定程序,准备等待用户按下开始按钮开始运行,按下开始按钮后,机械臂从当前位置回原位,然后按用户程序走,即事先要通过编程进行机械臂轨迹的设定,使机械臂重复地按照设定的轨迹进行运动到各个工作点位置,完成重复性的工件转位操作。
手动模式下,可以进行工作位置示教,参数、运动轨迹(用户程序(这里我想做触屏编程,但是你们有能实现的更好的方法也可以))的设定,机械臂的零位校准,IO信号的手动置位/复位。
3、预留16个IO接口给用户,但是一般,I0.0是外界给的停止信号,使程序停下来,电机也停下来,这是正常的停止。I0.1是外界给的系统急停的信号,使系统进入急停状态,保护人身安全的(程序停下,电机抱闸停下等,参考急停的具体作用),O0.0,O0.1分别是表示输出我机械臂系统停止、急停状态信号给外界的,剩下的I/O0.2-0.15是留给用户设置的。另外单独加一个开始的按钮。
4、IO信号一般是留下做用户编程的条件的,比如要进入用户设定程序的下一步,需要等待某个I信号为0或1,同时用户编写的程序也可以发出O信号,告诉和它联动的比如PLC我的某个状态,像是操作完成某一步的状态信号,又或者给安装的气爪磁性开关信号,告诉气爪应该开还是关。
相关推荐
标签

全部评论 / 0